Distorsion (audio)
Distorsion (audio)
La distorsion désigne, dans un appareil ou un canal de transmission, l’ensemble des modifications indésirables d’un signal1 qui ne soient ni un gain, ni une atténuation, ni un retard2.
Une certaine altération du signal est inévitable ; on cherche à transmettre celui-ci avec le plus d’exactitude possible. Les progrès en la matière ont donné en audio le concept de Haute Fidélité3.
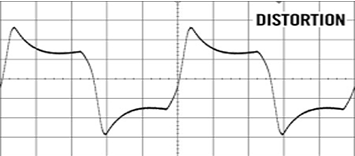
Cependant, alors que la plupart des techniciens cherchent à réduire les déformations du signal, d’autres, notamment les musiciens et leurs fabricants d’instruments, les cultivent et en font un élément constitutif de leur son. C’est le cas par exemple des amplificateurs pour guitare électrique4. Pour varier les effets musicaux, certains fabricants d’amplificateurs les munissent d’un réglage d’overdrive, et on trouve des pédales d’effet nommées distorsion, fuzz ou saturation. Ces appareils déforment en effet le signal, mais comme ils le font volontairement, il ne s’agit pas de distorsion au sens propre du terme.
Un des avantages majeurs du traitement numérique du signal est la possibilité de le transmettre sans aucune distorsion. Dans la chaîne numérique, il n’y a de distorsion que lorsque le signal est modifié.
Distorsion linéaire
La transformation de Fourier permet d’analyser tout signal en une somme de sinusoïdes.
La distorsion linéaire ne change pas le contenu en fréquences du signal ; celles qui sont présentes en sorties sont toutes présentes en entrée, bien qu’avec une valeur relative différente.
La distorsion linéaire se produit parce la chaîne de transmission ne traite pas exactement de la même façon les composantes sinusoïdales du signal, selon leurfréquence, sans pour autant que pour chacun d’eux, la linéarité du système soit affectée.
Dans un système linéaire :
- S(t + r) = a × E(t) + c
où t est le temps, S est la grandeur du signal en sortie, E sa grandeur en entrée, r un retard, a un multiplicateur, et c une constante.
Le système se comporte selon le principe de superposition.
On peut, en appliquant une correction inverse, retrouver le signal d’origine, au retard près. Cette forme de distorsion, qui se produit dans tous les éléments de la chaîne du signal, ne préoccupe pas trop les techniciens, puisqu’elle est à peu près réversible par une correction inverse appelée égalisation, tant qu’elle ne réduit pas le signal jusqu’à le noyer dans le bruit de fond. Certaines définitions ne la considèrent pas comme de la distorsion (Foret 1987, p. 200 ; Rossi 2007, p. 258, 264 ; Dic. Phys.).
Exemple — Correction de câbles :
Les longs câbles (comme en téléphonie) atténuent plus les fréquences élevées. On réduit ces distorsions linéaires par un amplificateur correcteur de câble au prix d’un léger accroissement du bruit de fond.
Généralement, la distorsion linéaire se manifeste à la fois par une distorsion gain-fréquence et une distorsion de phase.
Distorsion gain-fréquence
La distorsion linéaire survient lorsque le niveau du signal change, involontairement, en passant dans l’appareil d’une façon différente selon la fréquence.
Dans la relation S(t + r) = a × E(t) + c, le terme a varie selon la fréquence.
Distorsion de phase
On parle de distorsion de phase lorsque la phase relative des fréquences qui composent le signal change au passage de l’appareil.
Dans la relation S(t + r) = a × E(t) + c, le terme r varie selon la fréquence.
L’oreille est peu ou pas sensible à la phase et cette distorsion peut passer inaperçue. Mais la distorsion de phase a des conséquences sur l’amplitude du signal, dont le niveau de crête peut varier alors que sa puissance ne change pas, et sur la stabilité des systèmes bouclés, comme on peut le vérifier sur le diagramme de Nyquist.
Dans le premier cas, un autre appareil situé plus loin dans la chaîne peut créer de la distorsion harmonique par écrêtage à cause du niveau trop élevé ; dans le second cas, l’amplificateur électronique risque de se transformer en un oscillateur électronique. S’il s’agit d’un système de sonorisation, l’instabilité dans la bande passante se traduit par des sifflements de rétroaction acoustique (effet Larsen).
Causes
La distorsion linéaire se produit dans tout système, parce qu’il existe nécessairement des éléments réactifs, qui emmagasinent de l’énergie et la restituent avec retard.
Dans un système bouclé et plus généralement dans tout système où il existe plus d’une voie pour l’information d’un point à un autre, la transmission de cette information avec des retards différents dans deux chemins partant du même point et arrivant au même point crée des distorsions linéaires.
Exemple de distorsion linéaire dans un système complexe :
Lorsqu’on écoute un son dans un local fermé, aux parois réverbérantes, le son le plus fort, qui arrive le premier, en ligne droite, est renforcé par des sons qui ont pris des chemins passant par une réflexion sur une paroi. Leur trajet étant plus long, ils arrivent avec plus de retard et affaiblis par l’atténuation géométrique.
Chacun de ces sons retardés crée, avec le son direct, un filtre en peigne dépendant de son retard et de la différence de niveau. Quand ceux-ci sont faibles, ils résultent en une distorsion linéaire assez considérable, mesurable quand on place un microphone, mais que l’audition humaine est souvent capable d’interpréter comme une propriété du lieu et de compenser inconsciemment.
Les calculs qui s’appliquent aux filtres en vue d’une modification linéaire volontaire du signal s’appliquent de la même façon aux systèmes où les éléments résistifs et réactifs causent une distorsion linéaire. Les systèmes mécaniques et acoustiques se calculent souvent avec des équivalents électriques des éléments en cause, de façon à englober, dans un seul calcul, la distorsion linéaire et sa correction5.
Distorsion harmonique ou non linéaire
La distorsion harmonique se manifeste chaque fois qu’un élément de la chaîne est non-linéaire.
- Nous avons une opinion plutôt favorable de l’harmonie. Pourquoi cette distorsion est-elle appelée harmonique ?
Pourquoi harmonique ?
Si l’élément du système que nous étudions n’est pas linéaire, nous devons exprimer la relation entre son entrée et sa sortie sous une forme plus générale que dans le cas contraire :
Dans un système non-linéaire :
- S(t + r) = tordu(E(t))
où t est le temps, S est la grandeur du signal en sortie, E sa grandeur en entrée, r un retard, tordu une fonction quelconque.
Ne cherchons pas à préciser la fonction tordu par ses causes. Au xviiie siècle, des mathématiciens ont montré que n’importe quelle fonction peut se décomposer en unpolynôme. Ils ont montré aussi comment faire, mais cela ne nous intéresse pas ici. Il nous suffit de dire que quelle que soit la fonction tordu, il existe des coefficients a0,a1, etc. tels que

et ainsi de suite jusqu’à l’infini si nécessaire, ce qui s’écrit en notation mathématique :
Comme le signal peut toujours se décomposer en une somme de sinusoïdes, examinons ce qui se passe lorsque x, le signal, varie dans le temps comme une sinusoïde de pulsation ω (égale à 2 π fois la fréquence) et d’amplitude 1.

Pour les trois premiers termes :

Il se trouve qu’une identité trigonométrique nous indique que

et donc :

Par conséquent :

Le signal déformé contient maintenant, en plus de la sinusoïde d’origine, une autre sinusoïde de pulsation double, donc de fréquence double.
Qu’en est-il des  en général ? Plutôt que de développer laborieusement des identités trigonométriques, nous allons appliquer les méthodes trouvées par les mathématiciens qui l’ont déjà fait.
en général ? Plutôt que de développer laborieusement des identités trigonométriques, nous allons appliquer les méthodes trouvées par les mathématiciens qui l’ont déjà fait.
Pour cela, nous considérons qu’une sinusoïde est la projection d’un mouvement circulaire uniforme. Un point animé d’un mouvement circulaire uniforme parcourt un cercle, et si ce cercle est centré sur le point (0,0), à chaque instant t ses coordonnées sont cos t et sin t. On exprime ces deux nombres par en un seul nombre complexe, dont les parties réelle et imaginaire sont fournies par les coordonnées. Nous avons considéré que notre signal est un effet d’une cause plus compliquée (puisqu’il faut deux nombres pour la décrire), mais nous n’allons pas le regretter.
D’après la formule de De Moivre,
 .
.- où i désigne l’unité imaginaire.
L’élévation à la puissance n’est rien d’autre que la multiplication de la vitesse angulaire du mouvement circulaire uniforme ; et par conséquent, la multiplication de la pulsation des sinusoïdes qui sont ces coordonnées.
Si nous continuons le calcul avec les termes supérieurs, nous trouverons donc dans le signal tordu, des composantes pour beaucoup d’autres fréquences multiples de celle du signal d’entrée, selon les coefficients du polynome7.
Les fréquences multiples d’une fréquence fondamentale s’appellent des harmoniques.
Un système non-linéaire transforme un son pur en son harmonique.
- Les sons musicaux sont pour l’essentiel des sons harmoniques. Pourquoi est-ce déplaisant d’en créer dans la chaîne du signal ?
Les sons purs n’existent pas hors du laboratoire ; le signal est généralement composé de mélanges de fréquences, harmoniques ou non. Il faut examiner ce qui se produit lorsqu’un système non linéaire traite un mélange de fréquences.
Distorsion d’intermodulation
Article détaillé : Intermodulation.
Se produit dans un système non linéaire entre deux fréquences et génère des fréquences non harmoniques, correspondant à la somme et à la différence des fréquences d’entrée8.
Si le signal d’entrée d’un système non linéaire est une sinusoïde, correspondant à un son pur à une seule fréquence, le signal de sortie est un mélange de multiples de cette fréquence, correspondant à un son harmonique.
Si le signal d’entrée d’un système non linéaire est un mélange de deux signaux A et B, la sortie se décrit par la fonction S

Pour les termes que la petitesse de an ne rend pas négligeables, on développe (A + B)n. Le développement du binône est bien connu
Le coefficient binomial c9 va se combiner avec le coefficient an.
Le développement montre que la sortie du système comporte des multiplications des composantes du signal d’entrée élevées à une puissance, l’une par l’autre. Nous avons vu précédemment que l’élévation à une puissance d’une fonction sinusoïde est une sinusoïde harmonique. La sortie d’un système non linéraire présente par conséquent des multiplications, ou modulations d’amplitude de chacune des composantes de son signal d’entrée et de leurs harmoniques par chacune des autres10.
La trigonométrie montre que la multiplication de deux fonctions sinusoïdales est identique à la demi-somme de sinusoïdes de fréquences égales à l’addition et à la différence de leurs fréquences.
Ces sommes et différences, sauf coïncidence, ne sont pas des multiples des sons présents à l’entrée.
Un système non-linéaire transforme un son harmonique en son inharmonique.
On se sert de cette propriété pour évaluer les non-linéarités des appareils électro-acoustiques, au moyen d’un test d’intermodulation11. Un taux d’intermodulation de 0,2 % correspond à un effet audible, ressenti comme une perte de clarté ou de netteté du son (Rossi 2007, p. 280).
Dans les années 1970, on a pu incriminer des phénomènes d’intermodulation dans les étages de sortie d’amplificateurs audio reliés à une enceinte acoustique dans les différences subjectives de qualité relevées pour des appareils dont les mesures étaient similaires12.
Causes de non-linéarité
L’élément qui domine la production de distorsions est l’enceinte acoustique (Michaud 2013, p. 2). Diverses questions mécaniques provoquent une réponse non-linéaire des moteurs et membranes, et une question de principe, conséquence de l’effet Doppler-Fizeau lorsqu’un grand haut-parleur diffuse deux fréquences différentes en faisant vibrer deux parties différentes de sa membrane, provoque une distorsion non linéaire (Rossi 2007, p. 596).
Aucun circuit analogique n’est parfaitement linéaire. Certaines causes provoquent souvent des non-linéarités gênantes dans les circuits électroniques :
- un composant électronique comme une diode ou un transistor est utilisé dans une zone où sa caractéristique n’est pas linéaire, même approximativement ;
- l’amplitude du signal excède les limites autorisées par l’alimentation électrique du circuit ;
- le noyau d’un transformateur est saturé par le flux magnétique créé par le signal.
On parle de saturation pour les circuits lorsque le niveau de sortie (tension, courant) ne peut augmenter, même si le niveau d’entrée augmente.
Passé cette limite, le signal subit une importante distorsion non linéaire.
Quand ce n’est pas le cas, on peut réduire la non-linéarité, d’une part en disposant les composants de telle manière que leurs non-linéarités se compensent, et d’autre part en utilisant une partie du gain du système pour améliorer la linéarité par une contre réaction. Cette stratégie est toujours employée dans les montages de base de l’amplificateur opérationnel.
Chaque élément de la chaîne du signal apporte des distorsions. En surcharge ou en mauvaise adaptation, elles augmentent notablement.
- Les transformateurs introduisent des distorsions linéaires, de phase et harmoniques.
- Les têtes d’enregistrement et de lecture introduisent des distorsions harmoniques.
- Les amplificateurs, qui sont l’élément actif de tous les appareils, introduisent des distorsions harmoniques. Lorsque le niveau augmente, en général la proportion de distorsion par rapport au signal diminue jusqu’à un certain niveau, où elle augmente rapidement, soit que l’amplificateur soit incapable de délivrer une tension suffisante pour reproduire les crêtes du signal, soit que l’amplificateur soit incapable de faire changer son signal de sortie suffisamment vite pour suivre le signal. Certaines distorsions (comme la distorsion de raccordement entre les parties positives et les parties négatives du signal) provoquent une erreur à peu près fixe, et sont donc beaucoup plus importantes pour les signaux faibles (Foret 1987, p. 203).
Bruits, interférences et distorsion
Parmi les déformations indésirables du signal, il faut compter le bruit et les parasites ou interférences. Tous les éléments de la chaîne du signal analogique lui ajoutent un peu de bruit de diverses sortes, et éventuellement des interférences, par exemple, venant de l’alimentation en courant électrique alternatif. Bien que d’après la définition, ces déformations devraient être comptées comme des distorsions, on traite en général séparément de la réduction du bruit, des interférences, et des autres distorsions. Ces trois déformations ont des causes et des remèdes différents.
Mesure de la distorsion non linéaire
On mesure et on communique les taux de distorsion harmonique, c’est-à-dire la proportion de la puissance de sortie due à des harmoniques, lorsqu’on a à l’entrée un signal purement sinusoïdal.
Lorsqu’on effectue la mesure pour étudier un système, dans l’intention de l’améliorer, on effectue généralement des mesures à plusieurs niveaux, afin de déterminer un niveau optimal d’exploitation, et harmonique par harmonique. On obtient ainsi une distorsion harmonique 2, 3, etc..
Quand il s’agit de communiquer les performances d’un système, on donne généralement le rapport de la valeur efficace totale des harmoniques à celle de la fondamentale. Ce total s’obtient sans avoir besoin de mesurer harmonique par harmonique. On sépare le signal en deux parties entre la fréquence fondamentale et tout le reste. Le rapport entre les deux donne la somme de la distorsion harmonique totale et du bruit (THD+N) (Foret 1987). En principe, au niveau nominal d’exploitation, où s’effectue cette mesure, le bruit contribue très faiblement à cette valeur.
Exemple de THD+N :
Un amplificateur de ligne peut avoir un rapport signal sur bruit de 94 dB et une distorsion harmonique totale plus bruit THD+N de 0,015 % pour des sorties sur transformateur13.
Le rapport de puissances correspondant au taux de distorsion harmonique totale est de 20 × log (0,015 %) = -76 dB. Le niveau du bruit est 18 décibels en dessous. Sa contribution au total est négligeable.
En admettant que la tension de sortie soit de 1,
- La valeur efficace de la THD+N est de 0,015 % soit 15×10-5
- La valeur efficace du bruit est de 10(-94/20) soit 2×10-5
Sans les transformateurs, la valeur de la THD+N arrive presqu’au niveau du bruit, à 0,005 % soit 5×10-5, correspondant à un niveau de -86 dB auquel le bruit de 8 dB inférieur, contribue pour 0,8 dB14.
La THD ne peut pas servir pour vérifier la non-linéarité d’un système dans l’octave supérieure, puisque les harmoniques sortent de la bande passante. Pourtant, l’intermodulation de fréquences de cette partie du spectre peut créer des produits de différence dans l’ensemble de la bande passante.
Des méthodes normalisées permettent la mesure de la non-linéarité du système basée sur celle des produits d’intermodulation. Comme pour la THD, on peut évaluer la puissance des produits un par un ou globalement. Dans ce dernier cas, on utilise en particulier un signal multifréquentiel, comportant de nombreuses fréquences non harmoniques. Lorsqu’on analyse le signal en sortie, la puissance transmise entre les raies correspondant aux fréquences présentes en entrée est la somme de tous les produits d’intermodulation (Michaud 2013, p. 11-13 ; Temme 1992). Plusieurs autres méthodes permettent la mesure des non-linéarité dans les applications audio-acoustiques ; de nombreuses publications professionnelles traitent de la question.
La mesure de distorsion harmonique totale (THD) est la plus simple, mais la moins significative de toutes les mesures. Deux systèmes de caractéristiques fondamentalement différentes peuvent produire les mêmes résultats. Un taux de distorsion harmonique totale peut certifier que des composants ont une composante non-linéaire très faible, mais elle ne peut qualifier des éléments dont la non-linéarité est appréciable, c’est-à-dire, dans une chaîne de reproduction audio, principalement les enceintes acoustiques (Michaud 2013, p. 14-15).
Caractérisation perceptive de la distorsion non linéaire
Les méthodes techniques d’évaluation de la distorsion utilisent des signaux simples ; quand on étudie la réponse des systèmes à un son musical, on est amené à évaluer celles des composantes du signal qui se trouvent dans une relation inharmonique avec des composantes originales du signal. Cependant, les sons musicaux présentent toujours des parties inharmoniques, qui participent à la richesse de l’expérience musicale (Rossi 2007, p. 279).
Les systèmes audio sont souvent conçus en vue d’une reproduction sonore fidèle, dont on se dit qu’elle sera préférée des auditeurs. Mais les musiciens utilisateurs des instruments amplifiés semblent préférer certaines déformation du signal. Des audiophiles déclarent eux aussi préférer le son d’amplificateurs à tube. Pour donner un caractère objectif à leur préférence pour certains amplificateurs, ils mettent en avant le caractère particulier de leur distorsion. L’écart entre ces préférences conduit à s’interroger sur ce que les auditeurs perçoivent réellement des distorsions du signal audio. Des efforts considérables ont été produits pour relier les modèles physiques de la non-linéarité, les mesure de distorsion harmonique, d’intermodulation, d’intermodulation multifréquences, les modèles psychoacoustiques de l’audition, et des essais qualitatifs avec des groupes d’auditeurs naïfs et ignorant la nature des moyens utilisés pour produire les diverses voix et musiques qu’ils écoutaient (Michaud 2013, p. 22-29).
Ces recherches ont produit plusieurs métriques de qualité des signaux audio15.
Signal numérique
En traitement numérique, le signal se transmet sans aucune distorsion.
Le signal numérique se compose d’une suite de nombres correspondant à un niveau pour chaque échantillon. Ces nombres sont codés sur 8 à 64 bits pouvant avoir uniquement la valeur 0 ou la valeur 1. Il n’y a donc pas, pour ces nombres, une infinité de valeurs possibles comme dans les calculs ordinaires et les mathématiques. Le traitement du signal s’effectue avec des multiplications et des additions concernant ces nombres. Si le résultat d’une opération tombe sur un nombre intermédiaire entre des valeurs possibles, il faut arrondir. La valeur de l’arrondi est de la distorsion. Le souci des techniciens est, comme en traitement analogique, de réduire le plus possible cette distorsion. Cela se fait par l’augmentation du nombre de bits des nombres qui servent au calcul, et par la transformation de la distorsion de quantificationen bruit par le procédé du dithering (inquiétude du signal).
Certaines distorsions peuvent se produire de façon plus fortuite, au cours de la transmission. En effet, pour transmettre un signal sans erreur avec une certitude parfaite, il faut que le récepteur renvoie à l’émetteur, et que celui-ci vérifie que le retour est bien identique à l’envoi. Il s’agit d’un procédé la plupart du temps trop coûteux. Des codes de vérification permettent de détecter les erreurs. Lorsque le récepteur détecte une erreur, il utilise les indices transmis par les codes de vérification pour reconstituer les échantillons erronés. La plupart du temps, ces échantillons seront conformes à l’original ; dans quelques cas, il y a une petite distorsion.
Interfaces entre analogique et numérique
Convertisseurs
Dans les convertisseurs, les parties analogique et numérique sont très intimement mélangées. Avant la conversion, le signal analogique doit être filtré très vigoureusement, ce qui implique de l’amplification, cause possible de distorsion.
La conversion étant une transformation volontaire du signal, on ne peut pas parler de distorsion, si l’échantillonnage et la quantification sont conformes à ce qu’on a souhaité.
Les distorsions introduites à la conversion analogique-numérique aussi bien qu’à la conversion numérique-analogique sont irréparables. Il faut par conséquent les limiter au mieux.
Gigue
Le jitter ou gigue est une variation aléatoire d’un signal (Dic. Phys., p. 314). Quand elle affecte le signal d’horloge qui détermine les moments où les convertisseurs doivent mesurer (ou reproduire) une valeur numérique, elle entraîne de la distorsion, puisque les échantillons sont prélevés à un instant différent de celui prévu, et que le signal varie tout le temps. Par exemple, dans un convertisseur analogique vers numérique, si la tension du signal est croissante, et que l’horloge d’échantillonnage a du retard par rapport à sa pulsation normale, la valeur enregistrée est trop élevée par rapport à ce qu’elle devrait être. À la conversion vers l’analogique, la gigue a les mêmes effets en sens inverse Rossi 2007, p. 638.
La déformation du signal due à la gigue s’exprime comme un bruit si la gigue est véritablement aléatoire ; mais si elle est corrélée au signal, c’est une distorsion, qui peut être harmonique et d’intermodulation entre le signal et la fréquence d’échantillonnage.
La précision extrême nécessaire aux horloges de convertisseur est difficile à réaliser. La nécessité, pour beaucoup d’appareils, de travailler tous avec la même horloge oblige pourtant à transporter le signal d’horloge. Les lignes qui le transmettent peuvent le perturber par des parasites ou des ondes stationnaires, adoucir les pentes de ses transitions, etc. Les dispositifs de boucle à verrouillage de phase qui reconstituent un signal d’horloge dans les appareils n’ont pas en général la perfection des horloges indépendantes.
Les distorsions introduites par la gigue concernent les convertisseurs de tous les types :
- convertisseurs analogique-numérique ;
- convertisseurs numérique-analogique ;
- convertisseur de fréquence d’échantillonnage.
Défaut de quantification
Si les niveaux relevés par le convertisseur diffèrent de leur valeur nominale, la conversion introduit une distorsion. Cette préoccupation a amené à l’usage général, pour les applications de bande passante modérée et de grande précision, comme celles concernant l’audio, à l’usage du suréchantillonnage et des convertisseurs Sigma Delta Rossi 2007, p. 640-642.
Bibliographie
- Jacques Foret, « Le signal », dans Denis Mercier (direction), Le Livre des Techniques du Son, tome 1- Notions fondamentales, Paris, Eyrolles, 1987, 1e éd., p. 200-203.
- Pierre-Yohan Michaud, Distorsions des systèmes de reproduction musicale : Protocole de caractérisation perceptive, Université d’Aix-Marseille, décembre 2013 (lire en ligne)
- Tahar Neffati, L’Électronique de A à Z, Paris, Dunod, 2006, p. 84.
- Mario Rossi, Audio, Lausanne, Presses Polytechniques et Universitaires Romandes, 2007, 1e éd. (ISBN 978-2-88074-653-7)
- Steve Temme, « Audio Distortion Measurements », Application Note, Brüel & Kjær, no 385, 1992 (lire en ligne)
Article connexe
Notes et références
- Commission électrotechnique internationale, Electropedia 702-07-43 [archive] « distortion ».
- Glossaire de l’IEEE ; Foret 1987 ; Richard Taillet, Loïc Villain et Pascal Febvre, Dictionnaire de physique, Bruxelles, De Boeck, 2013, p. 207 ; Neffati 2006 ; Rossi 2007, p. 258.
- Michaud 2013.
- (en) T. E. Rutt, « AES Preprint 2141 F-5 — Vacuum Tube Triode Nonlinearity as Part of The Electric Guitar Sound », AES Convention, no 76, octobre 1984 (lire en ligne [archive]) ;(en) Daniel Queen, « AES Paper 450. From Boom Box to Beatles, Baez, and Boccherini — The Electric Guitar at the Crossroads. », AES Convention, no 31, octobre 1966 ; (en) Robert M.Poss, « Distortion Is Truth », Leonardo Music Journal, vol. 8, Ghosts and Monsters: Technology and Personality in Contemporary Music, 1998, p. 45-48.
- Par exemple, (Rossi 2007, p. 498sq)pour les microphones et 581sqpour les haut-parleurs.
- Voir Série de Taylor.
- Pour plus de détails, voir Rossi 2007, p. 273-276.
- Commission électrotechnique internationale, Electropedia 702-07-64 [archive] « intermodulation », 702-07-68 [archive] « distorsion d’intermodulation » ; Foret 1987, p. 202-203 ; Neffati 2006, p. 157 ; Rossi 2007, p. 277.
-

- On met à profit cette propriété des éléments non-linéraires en radio dans la modulation et la détection hétérodyne.
- (en) J.K. Hilliard, « Distortion tests by the intermodulation method », Proceedings of the IRE, vol. 29, no 12, 1941, p. 614-620 ; (en) C.J. Le Bel, « Measuring and Analysing Intermodulation », Journal of the Audio Engineering Society, juillet 1951 (lire en ligne [archive]) décrit la méthode sans .
- Jorma Lammasniemi et Matti Ottala, « La distorsion dans l’interface amplificateur enceinte », L’Audiophile, no 6, septembre 1978 (lire en ligne [archive]).
- Exemple d’ampli de distribution professionnel [archive].
- Voir Décibel ; Rossi 2007, p. 61-62.
- Voir entre autres (en) B. Paillard, P. Mabilleau, S. Morissette et Joël Soumagne, « PERCEVAL: Perceptual Evaluation of the Quality of Audio Signals », Journal of the AES, vol. 40, no 1-2, 1992 (lire en ligne [archive]) ; (en) Thilo Thiede et al., « PEAQ – The ITU Standard for Objective Measurement of Perceived Audio Quality », Journal of the AES, vol. 56, no 1-2, 2008 (lire en ligne [archive]) ; (en) Inyong Choi, Barbara G. Shinn-Cunningham, Sang Bae Chon et Koeng-Mo Sung, « Objective Measurement of Perceived Auditory Quality in Multichannel Audio Compression Coding Systems », Journal of the AES, vol. 56, no 1-2, 2008 (lire en ligne [archive]).
Contenu soumis à la licence CC-BY-SA. Source : Article Distorsion (audio) de Wikipédia en français (auteurs)

